首页
阿波和IT介绍
阿波和IT成果
阿波和IT成员
团队导师
联系我们
机器人动态路径规划算法(Robots-D*)研究
.A development team with both strength and technology.
项目简介:
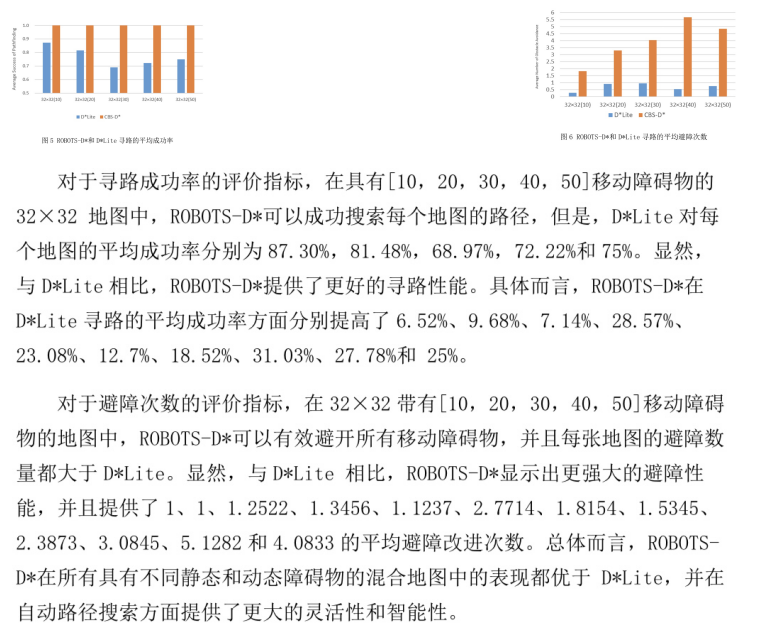
研究提出了一种部分可观测的机器人路径规划算法,即机器人动态路径规划算法 (Robots-D*),以实现机器人在移动多障碍物的混合动态环境中自动有效的寻路。 该算法以曼哈顿距离为启发式函数,并将增量搜索范围扩展到 3 阶邻居。它提出了一种避障的预判机制,并研究了机器人的等待和电路策略,以提高成功率。与具有代表性的 D*lite 算法相比,实验结果表明,ROBOTS-D*在暴露于移动障碍物较多的动态环境中时,其成功率和防撞次数均更高。
项目链接:
暂无
项目作者:姚池雨,周朱平,颜怡
您是第
【
473156
】
位访问者